
Globalna konkurencja, rosnące płace oraz niedobory kadry technicznej sprawiają, że automatyzacja i robotyzacja procesów stała się nieodzownym elementem strategii przedsiębiorstw produkcyjnych. Zakłady funkcjonujące w branży motoryzacyjnej, lotniczej i elektromaszynowej wprowadzają najnowsze technologie wytwarzania i organizacji produkcji. Głównym celem tych działań jest podniesienie jakości oraz zapewnienie powtarzalności produkcji. Jednym ze sposobów usprawnienia ciągu technologicznego jest zastosowanie robotów przemysłowych, które są obecnie wykorzystywane m.in. w procesach spawania, odlewania, kontroli jakości czy też w obróbce skrawaniem.
W odpowiedzi na wyzwania technologiczne XXI wieku na Wydziale Mechaniczno-Technologicznym w Stalowej Woli zostało utworzone Laboratorium Robotyki, które ma być miejscem kształcenia kadr i doskonalenia technologii na potrzeby Przemysłu 4.0. Na jego stanie znajdują się w tej chwili cztery roboty wyposażone w oprzyrządowanie pozwalające na realizację działań z zakresu spawalnictwa, odlewnictwa, obróbki ubytkowej, paletyzacji i kontroli. Wśród robotów wchodzących w skład laboratorium znajduje się jeden duży robot przemysłowy z oprzyrządowaniem laserowym, dwa mniejsze roboty przemysłowe o charakterze dydaktycznym z oprzyrządowaniem odlewniczym i obróbczym oraz nowoczesny co-bot (robot przeznaczony do bezpośredniej współpracy z człowiekiem) z oprzyrządowaniem paletyzacyjnym. Pracownia posiada również nowoczesne stanowiska dydaktyczne do automatyki przemysłowej, które zostały zintegrowane z robotem współpracującym. Dodatkowym elementem wyposażenia laboratorium są stanowiska komputerowe służące do programowania i symulacji pracy robotów w trybie off-line. Całość daje możliwość kompleksowego zdobywania wiedzy nie tylko z zakresu programowania robotów, ale również rozwijania umiejętności praktycznych w dziedzinie konkretnych technologii. Z laboratorium intensywnie korzystają zarówno studenci studiów dziennych, jak i zaocznych. Szczególnie dużo bezpośredniego kontaktu z robotyką mają ci studenci studiów magisterskich, którzy wybrali specjalność Robotyzacja i organizacja procesów wytwarzania. Widząc ogromne zapotrzebowanie na specjalistów w zakresie programowania robotów, Wydział Mechaniczno-Technologiczny prowadzi od ponad dwóch lat dedykowane, roczne studia podyplomowe pod nazwą – Programowanie robotów przemysłowych. Aktualnie trwa nabór na kolejną edycję tych specjalistycznych studiów. Laboratorium stwarza też możliwość prowadzenia krótkich, dedykowanych szkoleń dla mniejszych grup, dla których program kształcenia ustalany jest indywidualnie.
Jednym z robotów znajdujących się w nowym laboratorium WMT jest Fanuc LR Mate 200iD/4S, który może być wykorzystywany w procesach produkcyjnych z ograniczoną przestrzenią roboczą. Posiada predyspozycje do pracy w zwartych gniazdach zrobotyzowanych i na liniach produkcyjnych. Dzięki mniejszej masie, montaż robota na podłożu, stropie, ścianie maszyny (na zewnątrz lub wewnątrz), a nawet ,,do góry nogami” jest łatwiejszy i znacznie tańszy. Dodatkowo wyposażony został w różnego rodzaju funkcje inteligentne, m.in. czujniki wizyjne, czujniki siły oraz zestawy specjalnego zastosowania (chwytaki), umożliwiające chociażby realizację procesów odlewniczych. Znajduje zastosowanie m.in. w przemysłach obróbki skrawaniem, motoryzacyjnym, spożywczym, transportowym i elektronicznym. Stanowisko znajdujące się w Laboratorium Robotyki doposażono w unikatowy moduł do odlewania, który zaprojektowano na WMT. Dodatkowe dwa moduły technologiczne umożliwiają symulację przemieszczania palnika spawalniczego oraz obróbkę ścierną. Robot został zintegrowany z oprogramowaniem symulacyjnym FANUC ROBOGUIDE, co pozwala na projektowanie, planowanie aplikacji, wirtualne testowanie, zbieranie danych oraz optymalizację procesów produkcyjnych.



Kolejny robot na WMT to Kuka KR 3 R540, należący do serii robotów KR AGILUS. Jest to urządzenie bardzo wszechstronne, wykazujące dużą precyzję pracy na małej przestrzeni roboczej. Znajduje szerokie zastosowanie w procesach produkcyjnych, m.in. do nakładania klejów, uszczelniaczy, lakierowania, spawania łukowego w atmosferze gazów ochronnych, pakowania, obsługi maszyn do odlewania ciśnieniowego metali, montażu małych elementów, przykręcania śrub czy kontroli jakości. Dużym plusem, podobnie jak w przypadku wcześniej opisanego robota firmy FANUC, jest różnorodność podłoża, na którym może być zamontowany, np. na podłodze, stropie oraz ścianie. Ze względu na szybkość wykonywania zadań znajduje zastosowanie także w miejscach, w których wymagane jest skrócenie czasu pracy i zwiększenie wydajności produkcji. Wszystkie zadania związane z planowaniem i projektowaniem, mogą być wykonywane w trybie off-line, za pomocą oprogramowania KUKA.Sim Pro 3.1 oraz przesłane za pośrednictwem połączenia sieciowego do układu sterowania, co zapewnia większą elastyczność i produktywność. Robot został wyposażony także w ręczny programator KUKA smartPAD.


Trzecim robotem w laboratorium WMT jest robot współpracujący HCR-5, który może bezpiecznie pracować z człowiekiem, bez konieczności stosowania specjalistycznych barier ochronnych. Można go zainstalować obok operatora, ponieważ urządzenie zatrzymuje się, gdy wykryje kolizję zewnętrzną. Zapewnia łatwość programowania w oparciu o zasadę „uczenie przez pokazywanie” lub „rejestrowanie ścieżki, którą ma podążać”. Istnieje również możliwość podłączenia dowolnych urządzeń peryferyjnych, które pozwalają na obsługę maszyn, linii produkcyjnych, przenoszenie elementów, rozładunek i załadunek, realizację procesów montażu czy też kontroli jakości. Zastosowanie robotów z tej serii jest bardzo szerokie. Mogą być one wykorzystywane niemal w każdej branży. Ogromną zaletą robota jest jego precyzja – 100% bezbłędna praca według ściśle określonej procedury, co sprawia, że znalazł zastosowanie również w laboratoriach chemicznych i firmach farmaceutycznych. Do jego zadań należą m. in. precyzyjne lokalizowanie, przenoszenie i umieszczanie badanych próbek, obsługa wszelkiego rodzaju próbek (stałe, płynne, gazowe), odczyt kodów i opisów z próbek, archiwizacja i porównanie z wzorcem, integracja i sterowanie sprzętem laboratoryjnym. Oprogramowanie RODI z graficznym interfejsem użytkownika, poprzez odpowiednie rozmieszczenie poszczególnych ikon, ułatwia obsługę robota HCR. Obecnie na WMT jest programowany i wykorzystywany do zadań związanych z cieczami i materiałami sypkimi. Przemysłowe aplikacje takich robotów znajdują zastosowanie w motoryzacji, logistyce, spawalnictwie, specjalistycznych pracowniach laboratoryjnych oraz wykonywaniu precyzyjnych zadań przy współpracy z człowiekiem.


Największym robotem jest bardzo nowoczesny TruLaser Robot 5020 firmy TRUMPF. Jest on przeznaczony do opracowywania i testowania nowych technologii spawania, cięcia, napawania (proszkowego i drutem pełnym) oraz obróbki cieplnej z wykorzystaniem wiązki lasera. Urządzenie zostało wyposażone w trzy niezależne rodzaje głowic: do spawania, cięcia i napawania, dwuosiowy pozycjoner oraz stół obrotowy. Posiada również oprogramowanie do projektowania procesów spawalniczych, określenia rzeczywistego położenia spawanych krawędzi i korekty toru ruchu robota. Źródłem zasilania jest laser, pompowany diodowo.


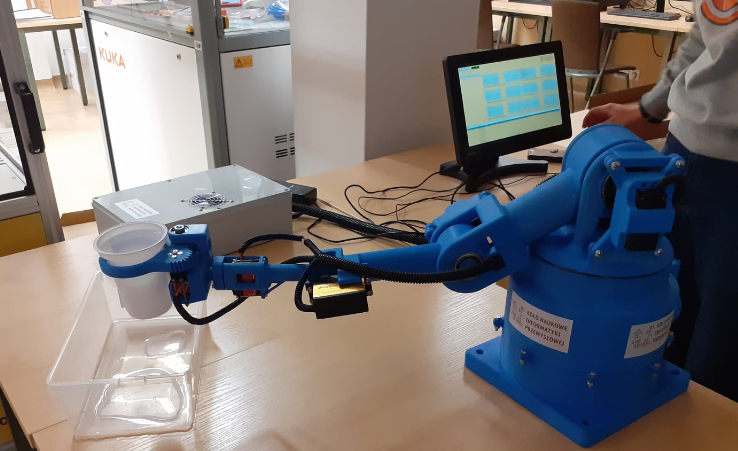
Koło Naukowe Informatyki Przemysłowej zainspirowane robotyzacją wykonało prototypowe ramię robota przemysłowego HUMERO. Projekt został zrealizowany przez dwóch studentów: Łukasza Kapałę i Aleksandra Janeczko. Całość prac projektowych i konstrukcyjnych wykonano z wykorzystaniem dostępnych na WMT urządzeń i oprogramowania. Do wykonania obudowy, korpusu i ramion zastosowano proces drukowania przestrzennego 3D. Ramię robota posiada sześć ruchomych osi z możliwością niezależnego ich kontrolowania przez sprzężenie układu sterowania z funkcjonalnym interfejsem użytkownika. Głównym urządzeniem napędzającym robota są serwomechanizmy, czyli zamknięte układy sterowania zawierające małe silniki elektryczne połączone z przekładnią zębatą. Z poziomu rozbudowanego panelu sterowania oraz wykorzystania m.in. platformy minikomputera Raspberry Pi oraz modułu Arduino, operator może programować określone polecenia, które są następnie wykonywane przez ramię HUMERO.

Wyposażenie Wydziału Mechaniczno-Technologicznego w roboty przemysłowe pozwala na zdobycie przez studentów umiejętności praktycznych związanych z robotyzacją i automatyzacją procesów wytwarzania. Ma to istotny wpływ na ich dalszą karierę zawodową po ukończeniu studiów. W związku z dynamicznie rozwijającym się Przemysłem 4.0, nabyta wiedza i doświadczenie zawodowe pozwoli absolwentom WMT na znalezienie atrakcyjnego zatrudnienia na stanowiskach technologów czy też programistów robotów przemysłowych. Zainteresowanie robotyzacją jest coraz większe wśród młodzieży szkół średnich, co szczególnie widoczne jest podczas finału ogólnopolskiego konkursu „Od pomysłu do przemysłu” (https://knip.prz.edu.pl/konkurs-od-pomyslu-do-przemyslu), konkurs jest corocznie organizowany przez WMT oraz Zakład Elektroniki i Automatyki CHIP.
Wydział Mechaniczno-Technologiczny Politechniki Rzeszowskiej w Stalowej Woli prowadzi rekrutację na studia podyplomowe „Programowanie robotów przemysłowych”. Szczegółowe informacje na ten temat: https://wmt.prz.edu.pl/studia-podyplomowe/programowanie-robotow-przemyslowych.


Bądź pierwszy, który skomentuje ten wpis